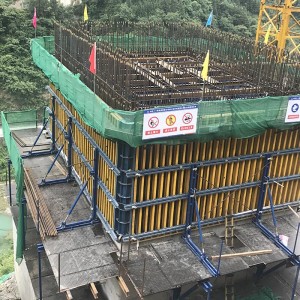
Қолаби гидравликии ба боло баромадани худкор



Тафсилоти маҳсулот

Хусусиятҳо



Ду намуди қолабҳои гидравликии худкори кӯҳнавардӣ: HCB-100 & HCB-120
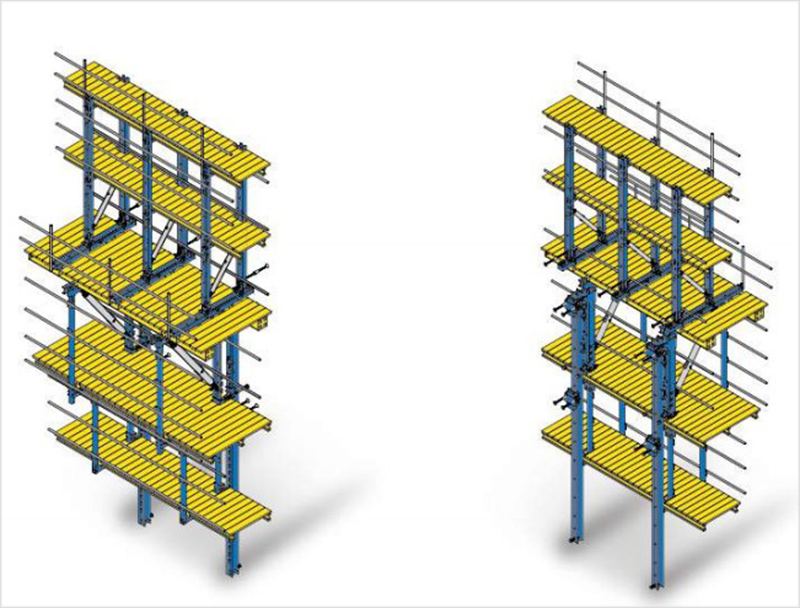
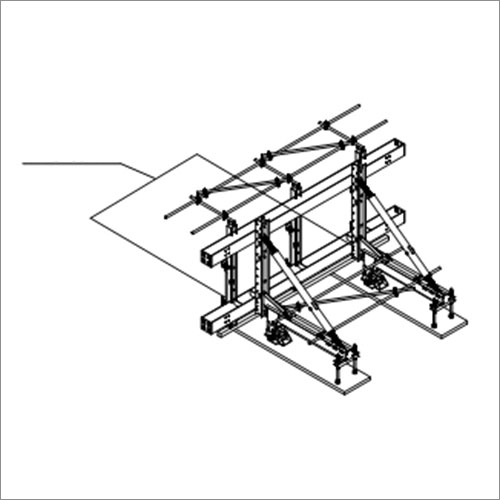
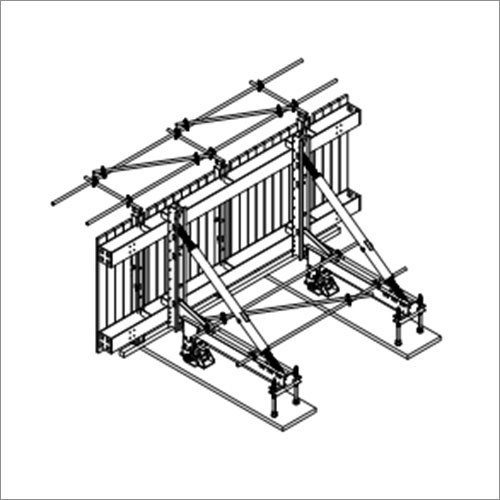
1. Диаграммаи сохтори навъи қавсҳои диагоналӣ
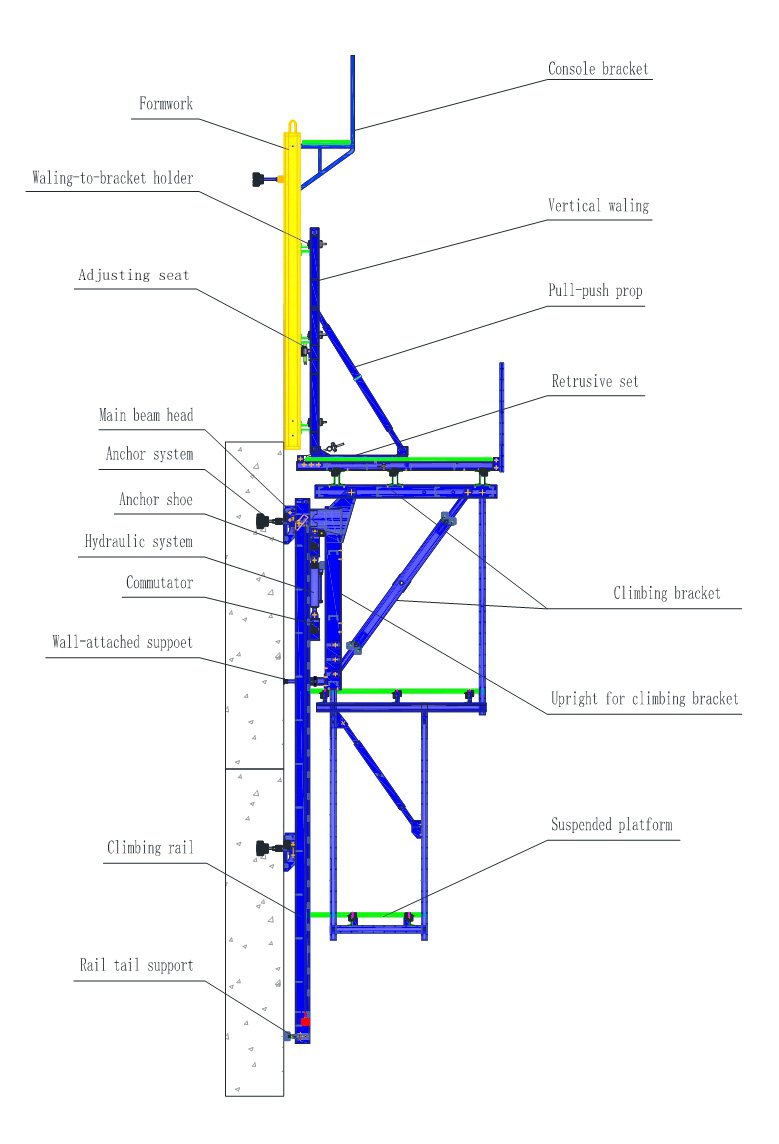
Нишондиҳандаҳои асосии функсия

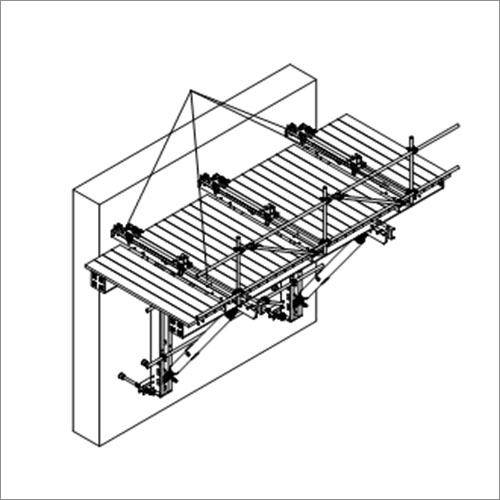
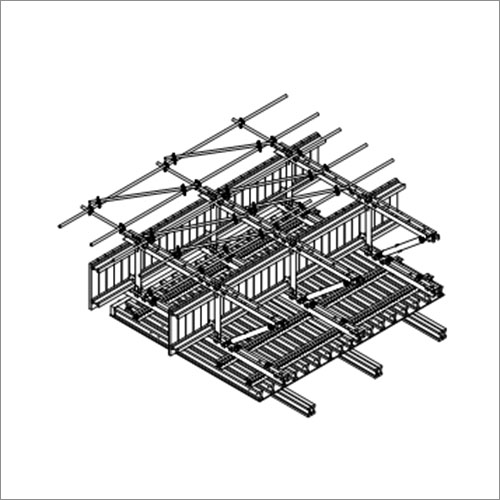
2. Диаграммаи сохтори навъи ферма
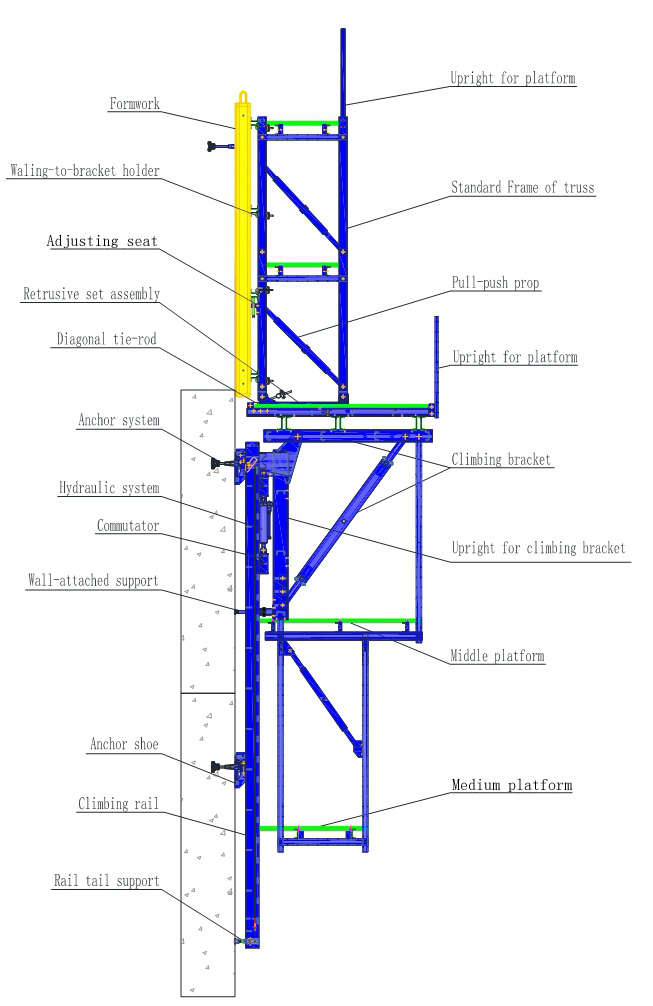
Фермаи композитӣ
Фермаи алоҳида
Нишондиҳандаҳои асосии функсия

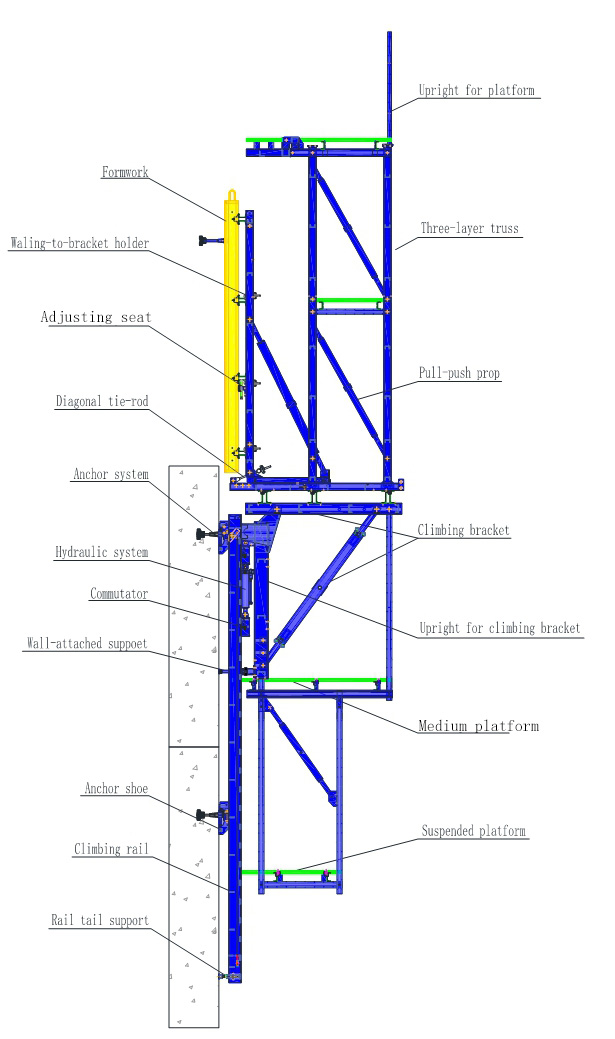
Муқаддима ба системаҳои қолаби гидравликии худкоркӯча
3. Ҷузъҳои стандартӣ
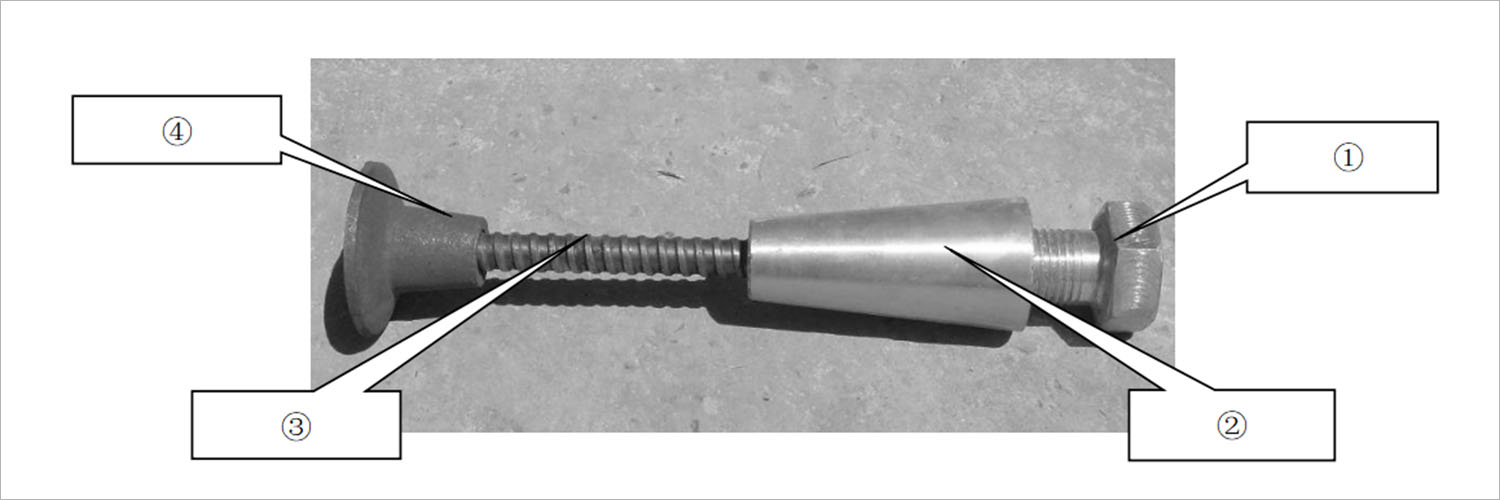
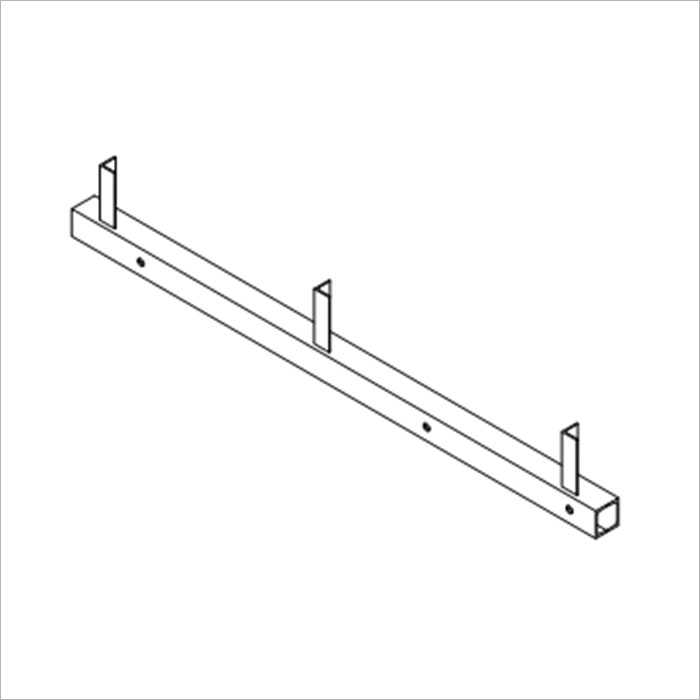
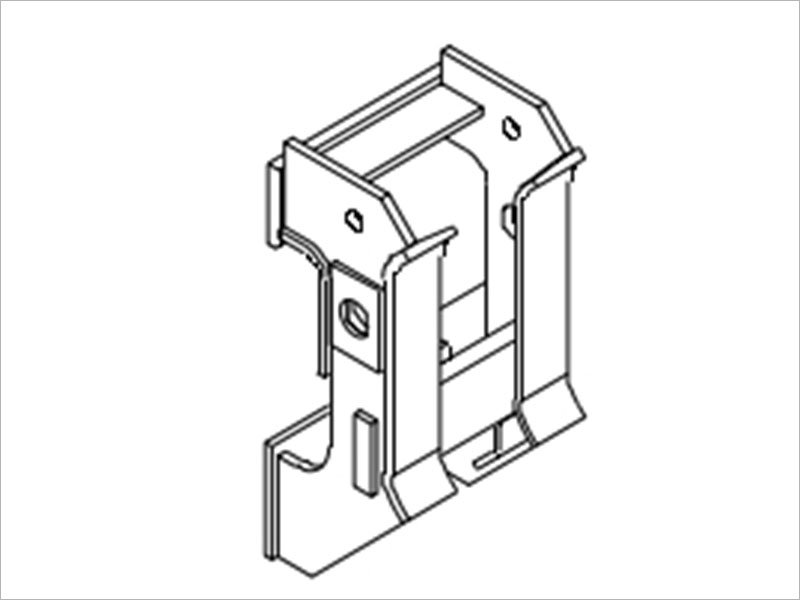
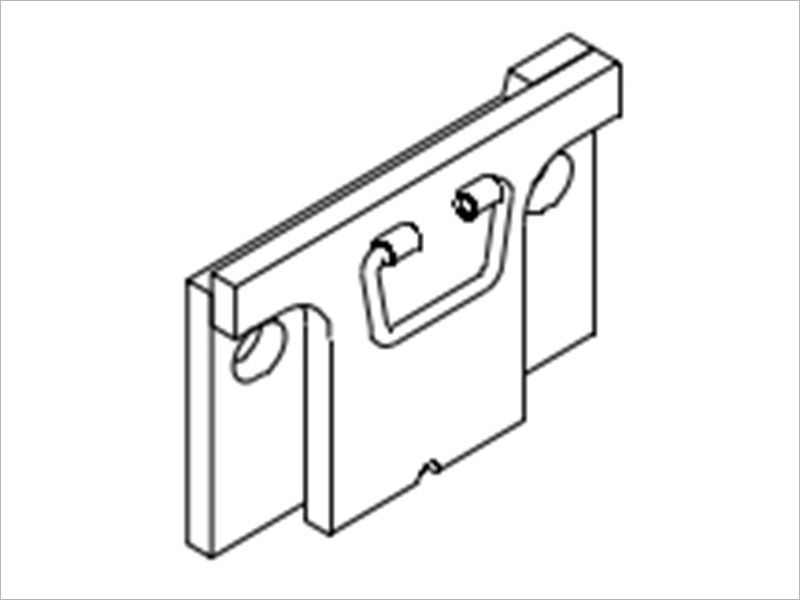
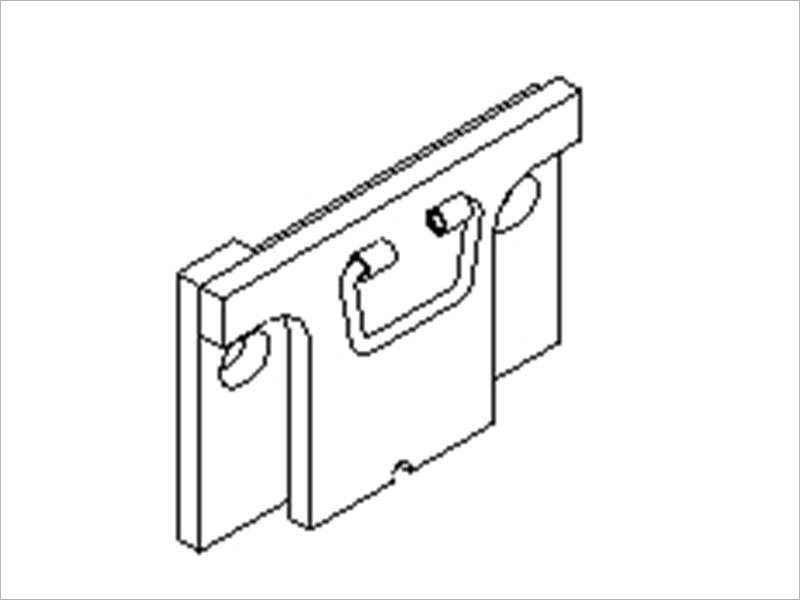
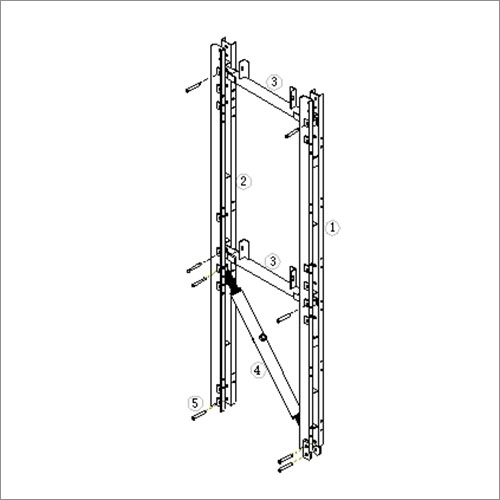
Қавси борбардор
①Чӯби салиб барои кронштейни борбардор

②Қуттии диагоналӣ барои қуттии борбардор
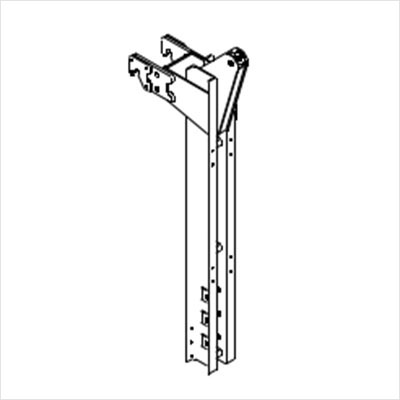
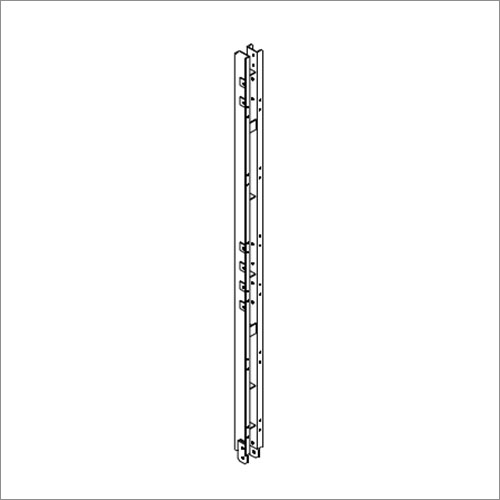
③Стандарт барои кронштейни борбардор
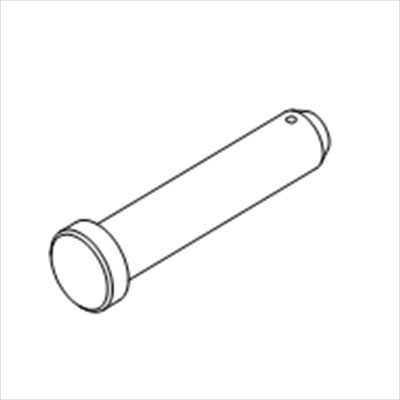
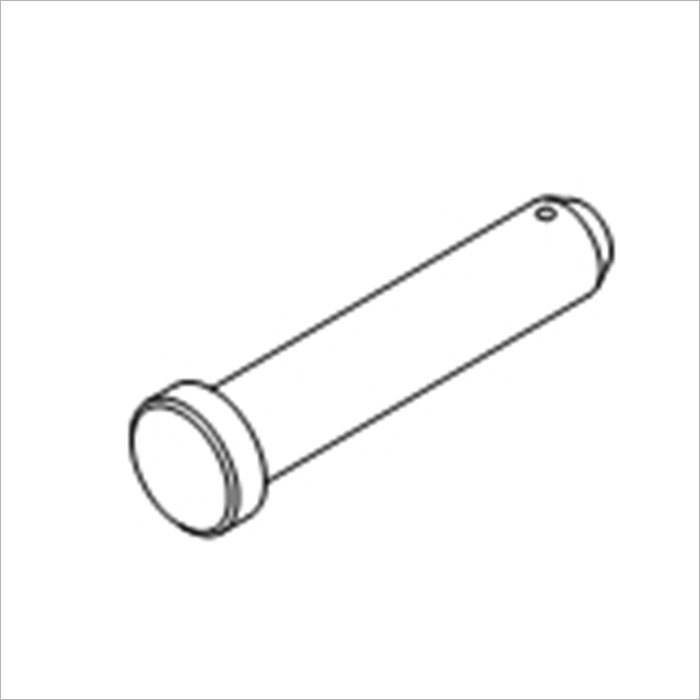
④ Пин
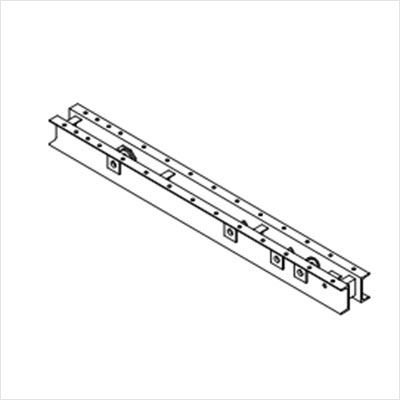
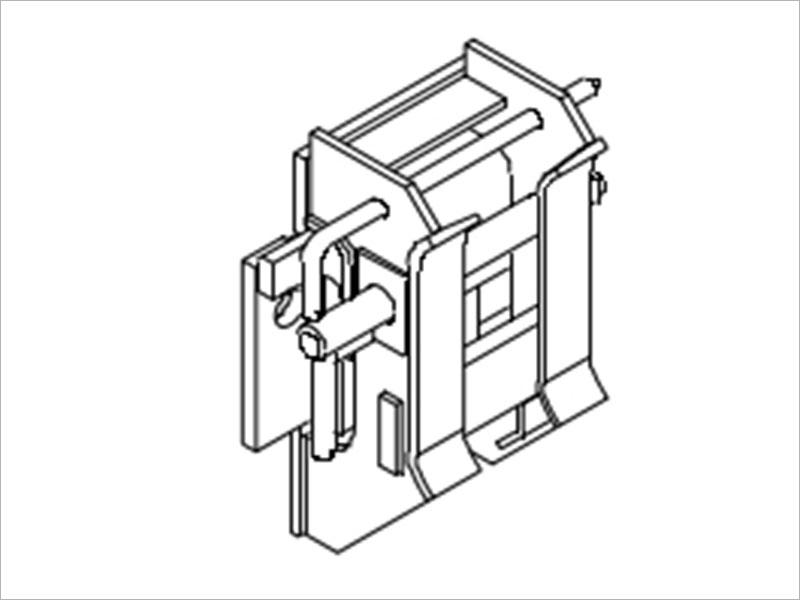
Маҷмӯи маҷмӯи ретрузивӣ
Маҷмӯи чӯбҳои ретрузивӣ

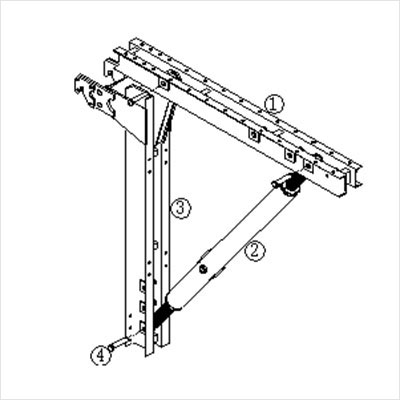
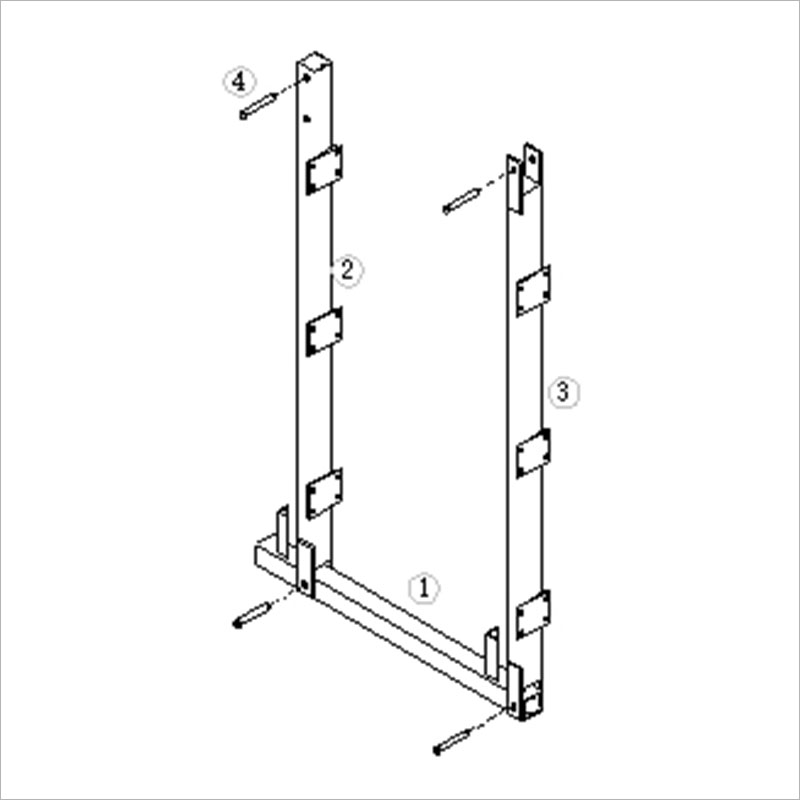
Платформаи миёна
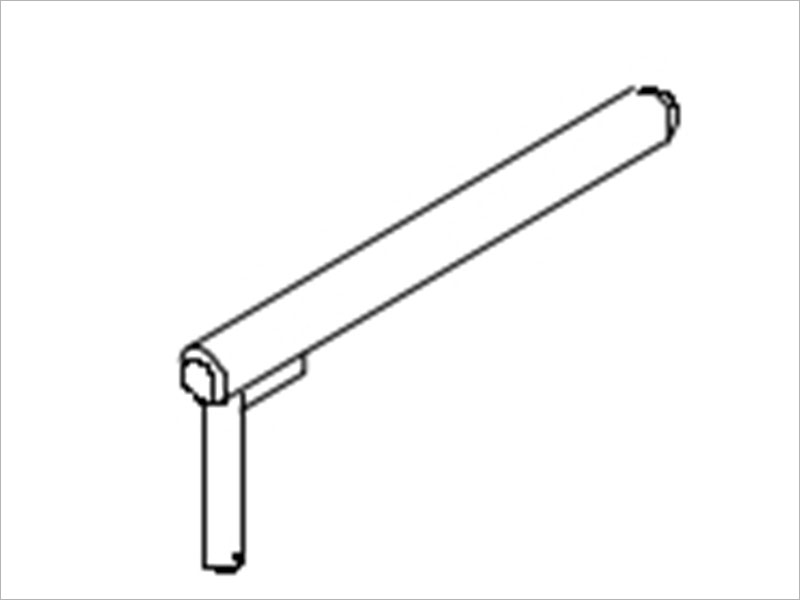
①Чӯби салиб барои платформаи миёна
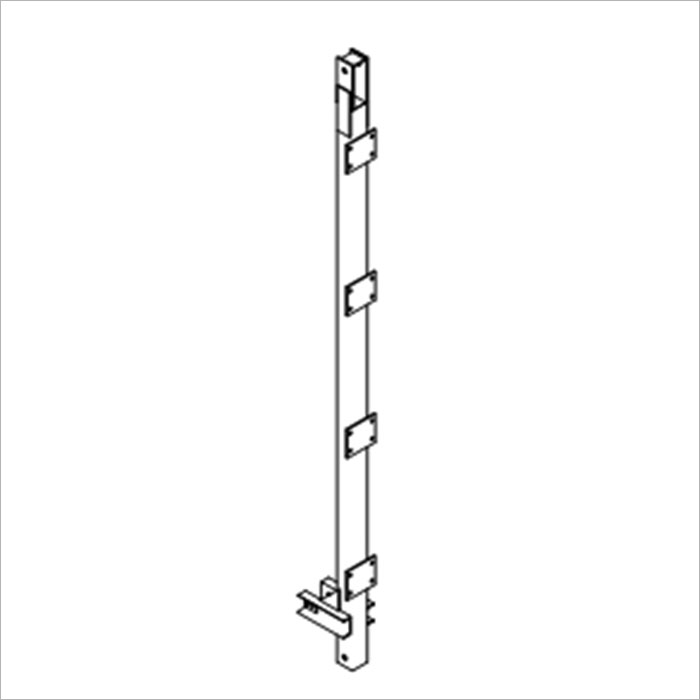
②Стандарт барои платформаи миёна
③Пайвасткунак барои стандартӣ
④Пин
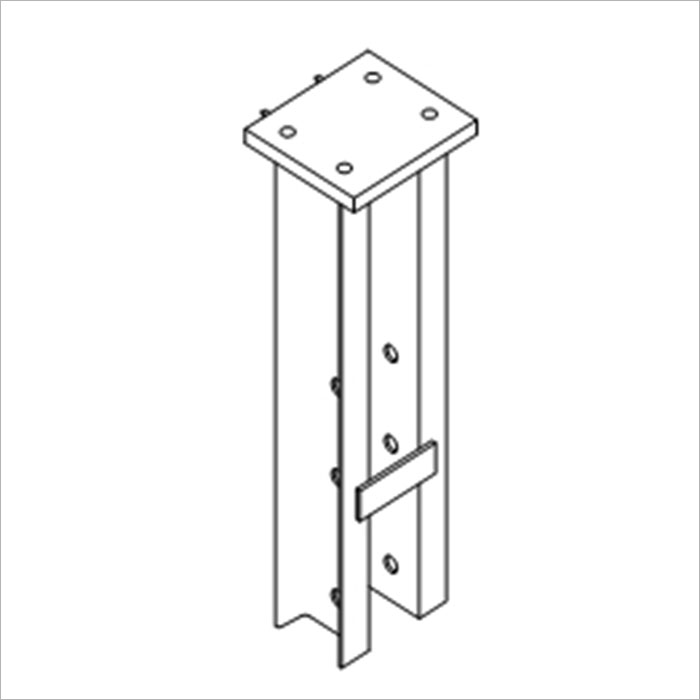
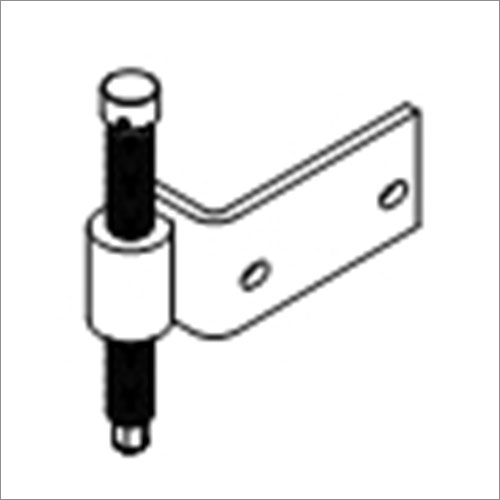
Пойафзоли лангарии ба девор часпонидашуда
Дастгоҳи ба девор васлшуда
Пини подшипник
Пини бехатарӣ
Курсии ба девор часпонидашуда (чап)
Курсии ба девор часпонидашуда (рост)
Маҷмӯи платформаи овезон

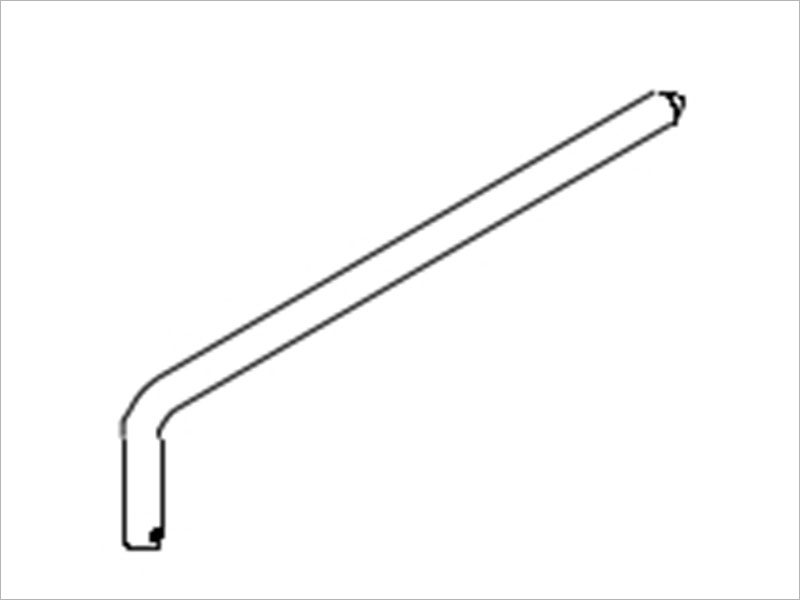
①Чӯби салиб барои платформаи овезон
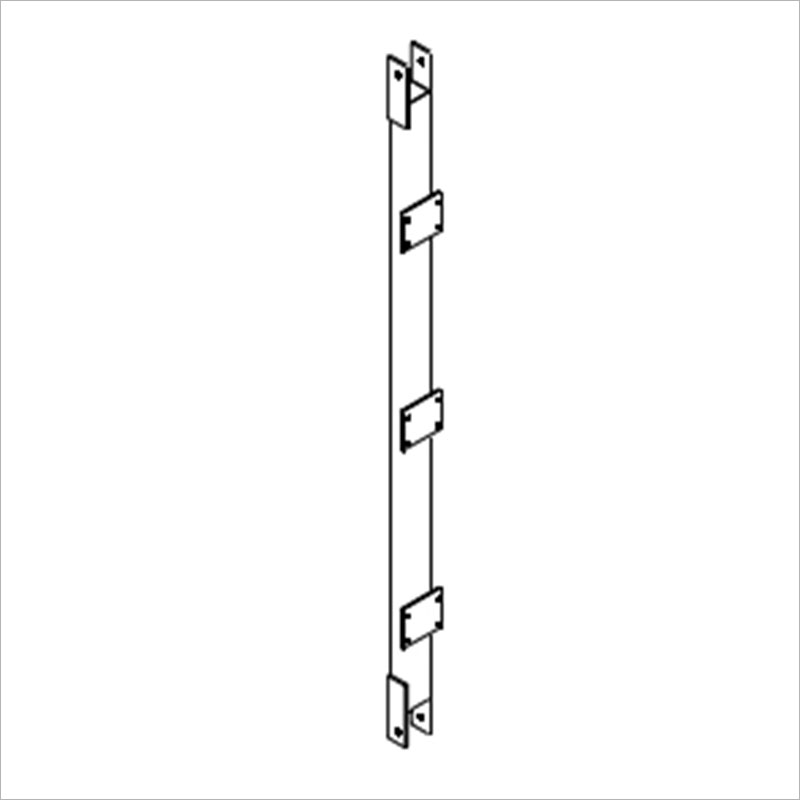
②Стандарт барои платформаи овезон
③Стандарт барои платформаи боздошташуда
④пин
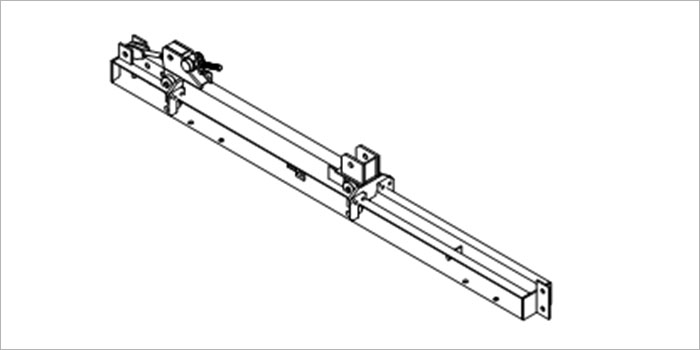
Қисмати стандартии асосии валер
①Волери асосӣ 1
②Волери асосӣ 2
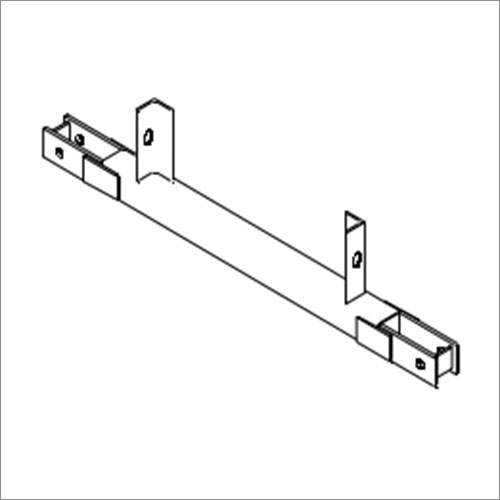
③Чӯби платформаи болоӣ
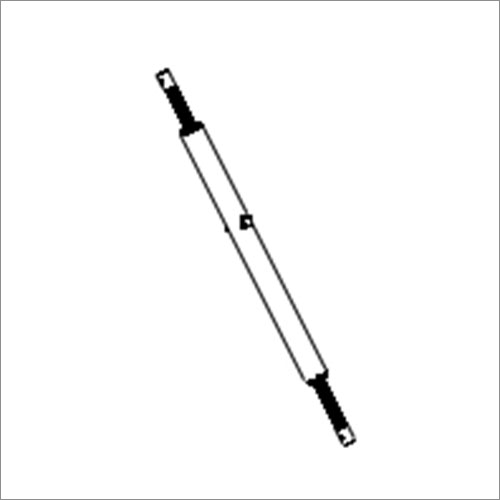
④Қуттии диагоналӣ барои муҳаррики асосӣ

⑤Пин
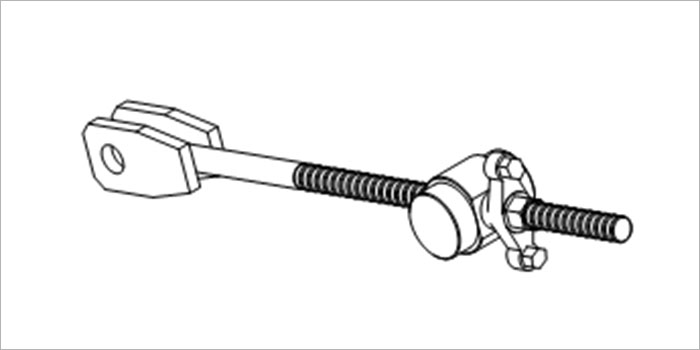
Танзими нишаст

Қулфи фланҷӣ
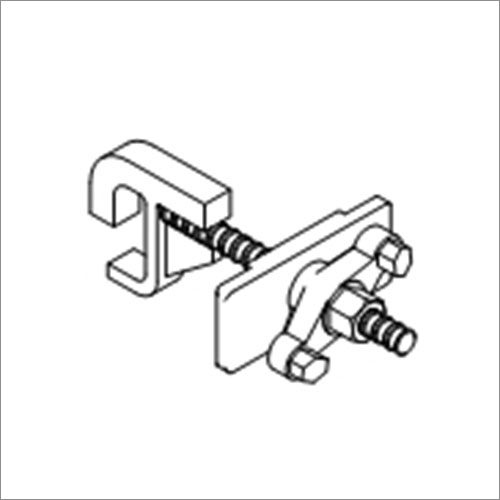
Дорандаи Waling-to-braket

Пин

Асбоби берун овардашуда барои баромадан ба конус

мӯи мӯй

Пин барои waller асосӣ
4. Системаи гидравликӣ

Системаи гидравликӣ аз коллектор, системаи гидравликӣ ва дастгоҳи тақсимоти барқ иборат аст.
Коммутатори болоӣ ва поёнӣ ҷузъҳои муҳим барои интиқоли қувва байни кронштейн ва рельси болоравӣ мебошанд. Тағйир додани самти коммутатор метавонад ба болоравии мутаносиби кронштейн ва рельси болоравӣ мусоидат кунад.
①Маҷмӯи қавс
②Насби платформа
③Бардоштани кронштейн
④ Насби платформаи васлкунӣ ва амалиётӣ
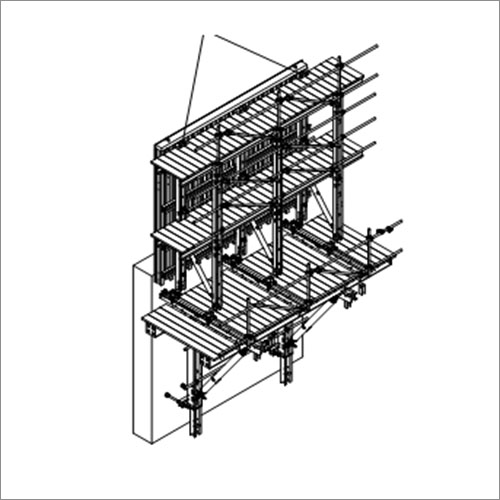
⑤Бардоштани ферма ва қолиб
Аризаи лоиҳа

Маркази молии ҷаҳонии Шэньянг Баоненг

Дубай SAFA2
Паёми худро дар ин ҷо нависед ва ба мо фиристед